






Laderachsen
Linienportal
Linearportale sind die einfachste Variante eines Portalroboters. Die Punkte, die mit dem Greifer angefahren werden sollen, liegen in einer Achse. Der Portalschlitten ist für die Horizontalbewegung auf der Hauptachse zuständig, die Vertikalbewegung wird vom Portalarm durchgeführt.
Auslegerportal
In manchen Fällen ist es notwendig eine zusätzliche Bewegung orthogonal zur Portallängsachse auszuführen. Bei kurzen Strecken bzw. relativ geringen Teilegewichten wird dies über Auslegerportale gelöst. Am Hauptschlitten ist ein Auslegerarm/Schwenkarm montiert, der wiederum den Portalarm mit dem Greifer trägt. Als zusätzliche Option besteht die Möglichkeit die Handachse um einen vierten Freiheitsgrad zu erweitern.
Flächenportal
Sind große räumliche Bereiche abzudecken, wird auf Flächenportale zurückgegriffen. Hier kann der Portalarm auch über eine große Fläche beliebig positioniert werden.
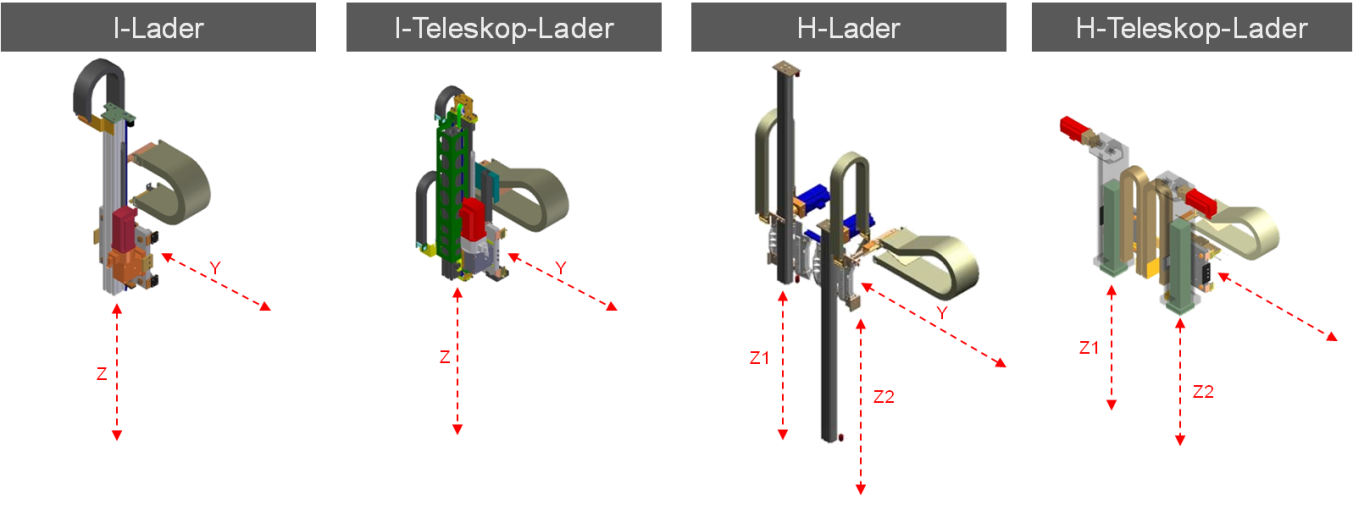
H-Lader
Beim H-Lader sind 2 unabhängige Arme mit Greifer auf einer Achse parallel angeordnet. Der Abstand zwischen den Armen ist fixiert. Diese Anordnung wird zum Beispiel für lange Wellenteile/Kurbelwellen oder kubische Teile verwendet, bei denen ein Schwenkgreifer nicht mehr sinnvoll verwendet werden kann.





